blubb
Weight of the components
due to my hard crash on the weekend I decided to take my Eachine Racer 180 completely apart.
I weighted all the parts so maybe this is interesting for someone.
- 1 sideplate 30gr
- complete carbon frame 75gr
- all mechanical parts 67gr (without the yellow box)
- my upgraded servo 48gr
- 1 complete arm 83gr
- all electronics 79gr
So in total mine will be around 435gr without battery.

Eachine racer 180 under construction
Kreuzberg Art – bulb exposure
We did some fun on Friday night… see the result!
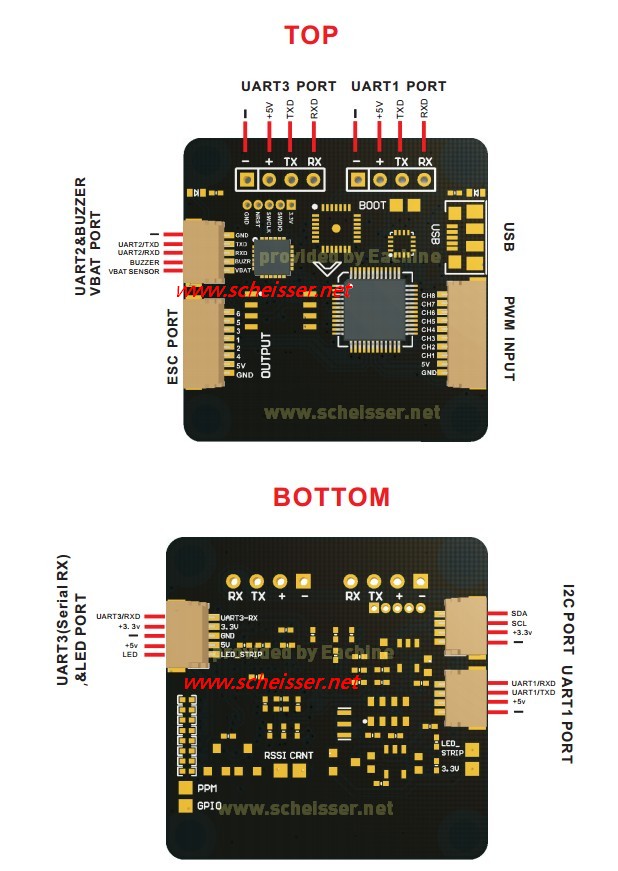
Eachine Racer 180 IMU board connectors
Hey for all the guys out there, here is the contact plan for the eachine 180 racer flightcontroller…
This is a customized F3 board.
Thanks to Eachine for providing this.
Geese hunting with quads
footage from this weekend…
Project unknown further thoughts
I think we have a proof of concept with some risks. When I think about the setup all is done, but will the FC do the things I want from it?
I was dealing with a brand new flight controller from far east. It is a FC with a built in VTX and OSD. Long story short with our brand new design it is not possible to use the onboard OSD. We are still trying to find out what is the most stable (in case of a crash) and most agile frame with less weight. Also we are thinking of a race unit or going for a video stabilized quad with longest flight times. Maybe a mix of both worlds. „Project Unknown“ will be a milestone for the future if there will be no other vendor from far east to force us on our knees.
Trappy this is your chance to get in contact with me again. PJCTUKNWN will be a huge impact if we will get it to life…
dual tilt multirotor
As I dive more into the multirotor builds there are more ideas to construct the perfect copter. right now I am thinking of a quad with 2 tilted axis. So the gimbal is obsolete at this build and the agility is much improved to any other multirotor on the market. The pitch and the roll will be done by special axis not by the props itself. the advantage is more speed and more stability for the camera on board. I will try to get a workring prototype as soon as possible to test out what I am thinking about. There will be a fully stabilized cam on board with the same power and speed as a quad racer, hopefully. The design will be at 8-10″ props but more powerful than everything is on the market at this time.