This weekend I took some of my free time to bring my MK2 Cetus to the newest parts. As some of you might know I have a modified Cetus MK2 and a modified MK3 here. Both look the same but have slight differences construction wise which doesn´t make it possible to upgrade easily a MK2 to a MK3.
Z-axis one way clutch bearing.
Both the MK2 and the MK3 have a one way needle bearing installed on the z-axis motor shaft. I´m not sure if the MK1 had this also so this is only one finding from yesterday on my printers. This bearing should prevent the axis falling down and crashing the build plate in case of emergency stop of the board or power loss of the motors. What I realized that the bearing on the MK3 behaves much different and slowly let the axis fall down when the board is shut down or motor off command is sent. A long time ago I already tried to adjust the MK2 bearing to stop at the position when the z-axis motor is off but struggled with some issues after. It is indeed possible to hold the position of the Z-axis on the MK2 version but makes the axis behave like there is a backlash. Especially when the axis have to move short distances which happens at every print. The result with my tests at this time to adjust the bearing tension ends by loosing it again as the z-level was not pisitioned precisely anymore. Intersting fact here is that the MK3 positions great so there have to be differences which I figured out 2 days ago.
On the MK3 Tiertime used a different one way clutch bearing.
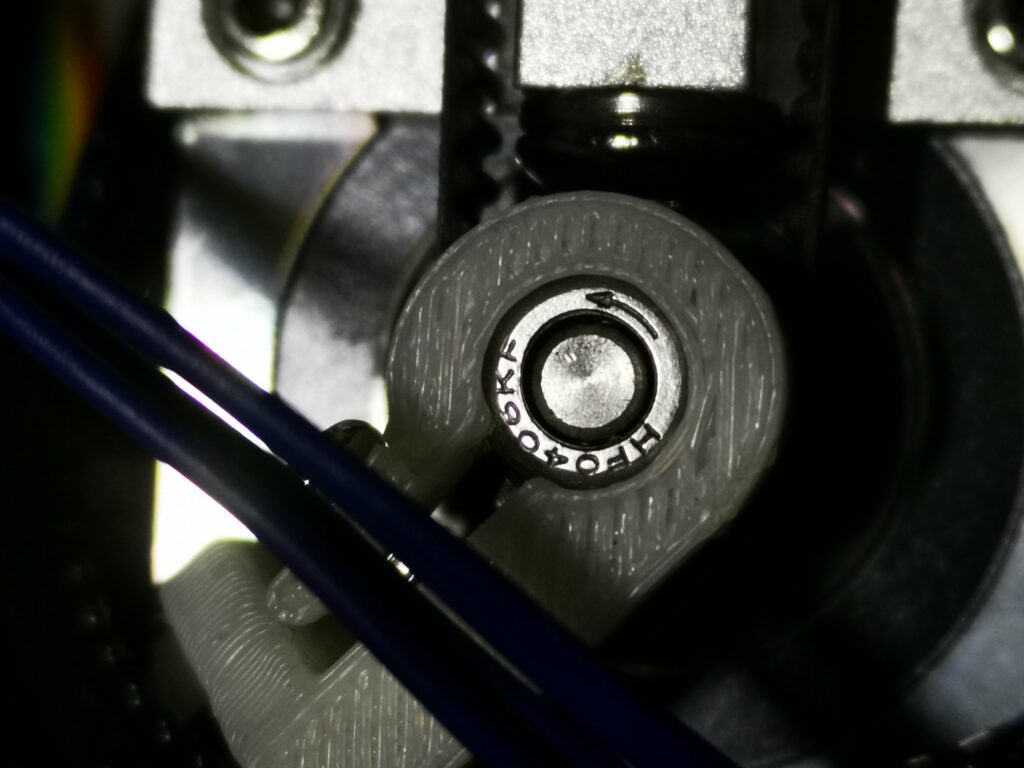
While the MK2 has a HF0406 needle bearing installed at the MK3 there is a HF0406-KF needle bearing supporting the z-axis. After some research i found out that the addition KF means that in the needle cage there are plastic springs added. So this is a special version of the HF0406. I ordered 2 parts of the KF version and will test the upcoming days to upgrade this useful function into the MK2 version.
UPDATE 2020-11-05:
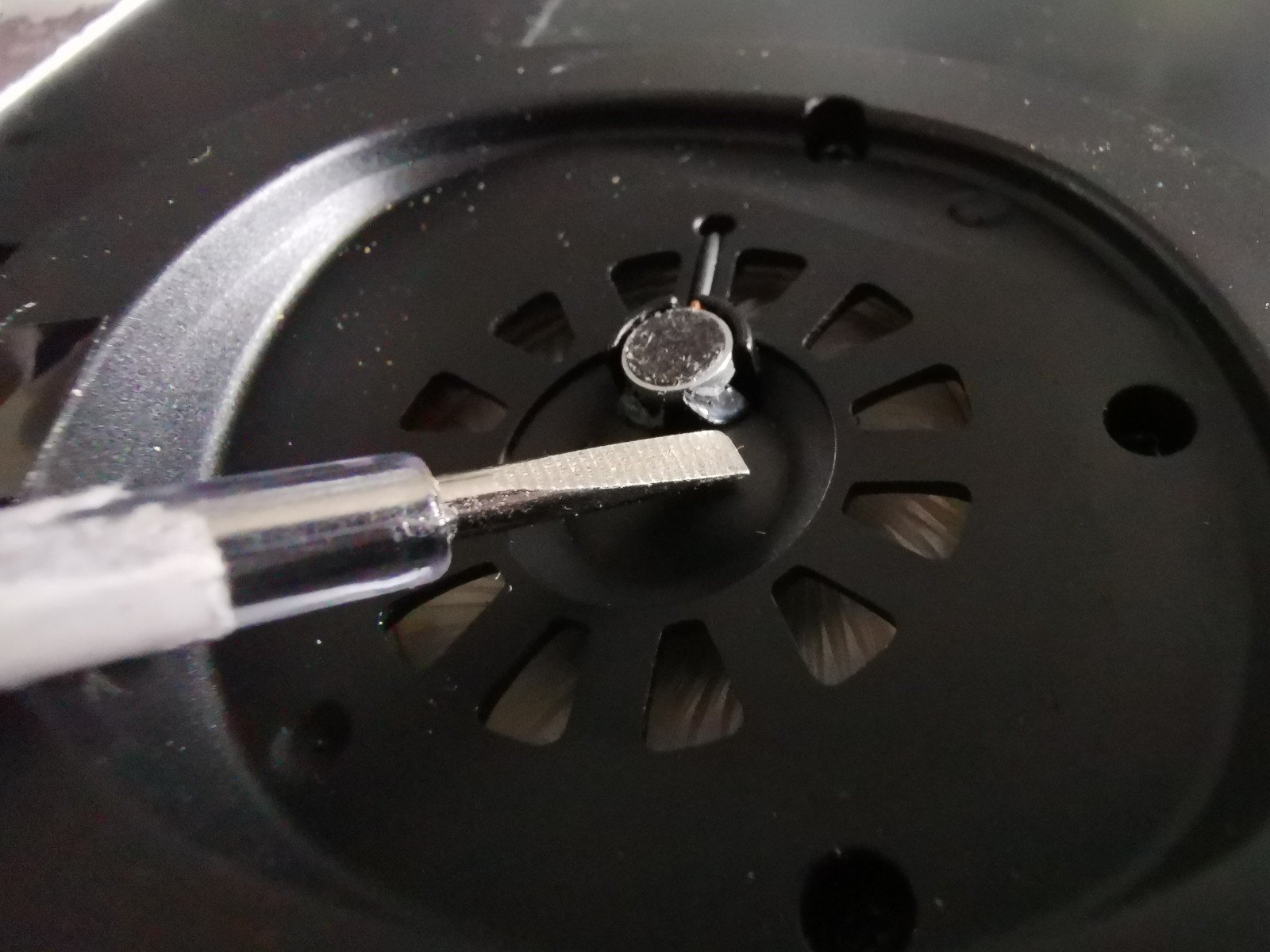
The bearing doesn´t make much difference. The solution for preventing the Z-axis from falling down is to short the motor wires. This seems to happen at the MK3 in the mainboard.
MK2 HF0406 below

MK3 HF0406KF below