I only want to make you aware that there is a lot going on over here. While my wife and I purchased a house in March 2021 there are so much actions ongoing which block me at the moment to work on the other tech projects… I will grab those up in the future again especially the NAS and the multirotor topics. Further there is a chance to have some travelling posts happen again here as soon the the pandemic is under control. so stay tuned for this blog in future with upcoming posts.
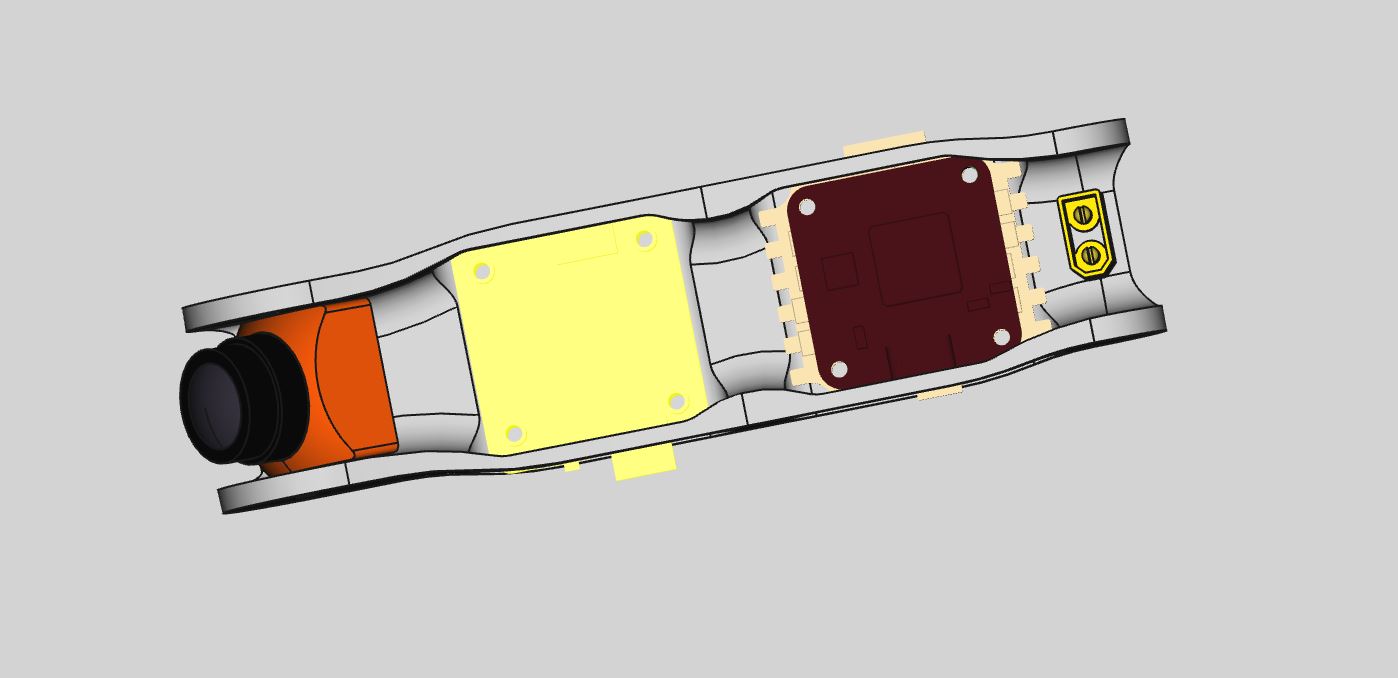
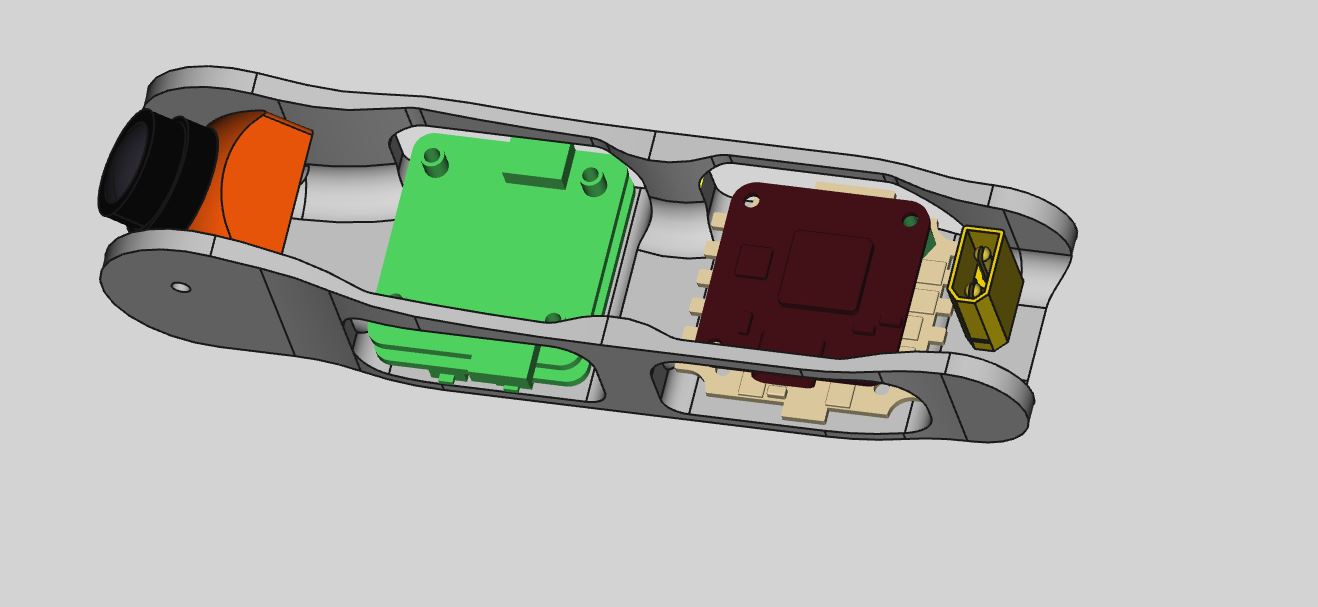
Prototyping ultra xxx
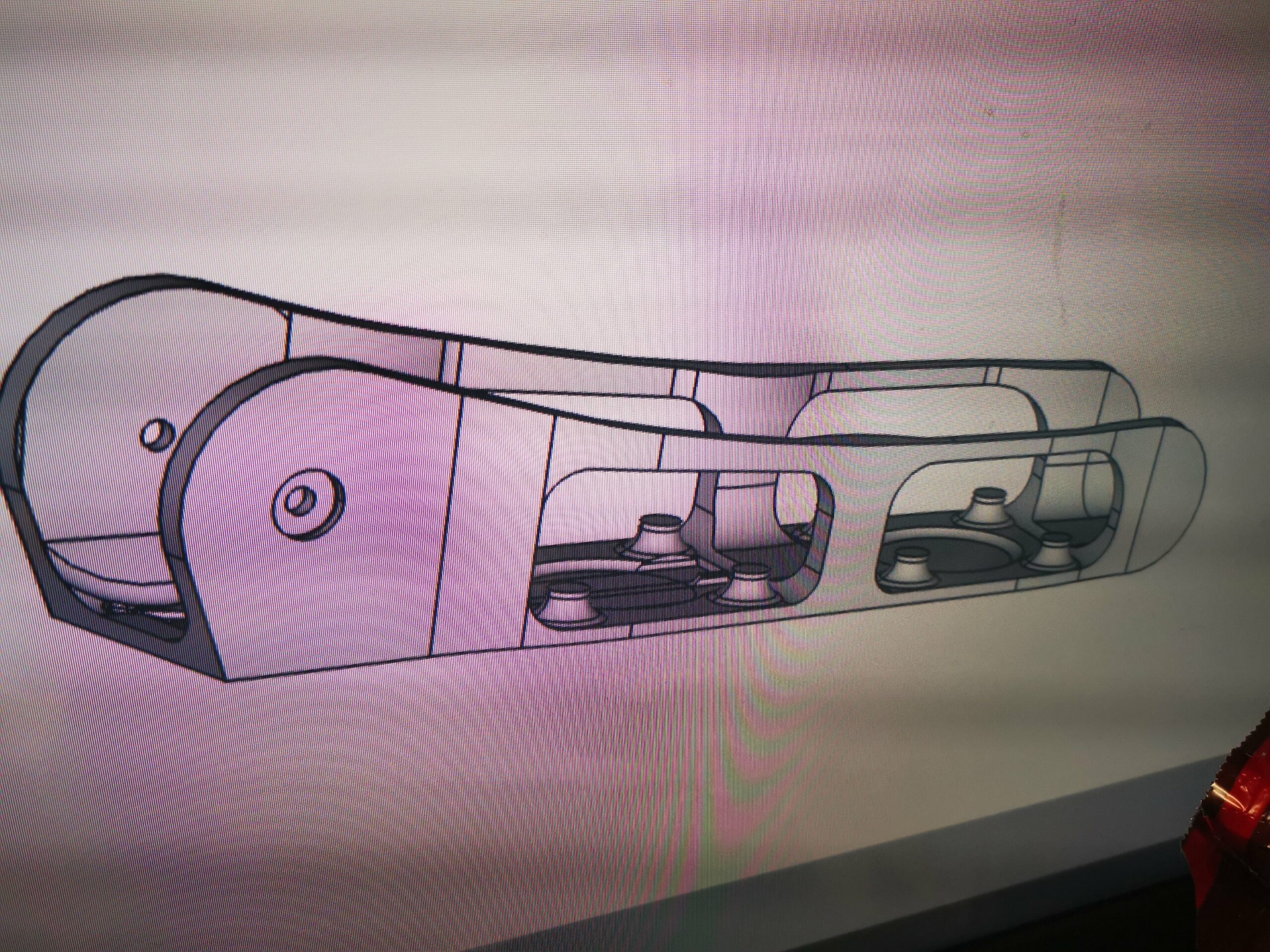

proto in progress
restarted this huge project. there are thousands of ideas and millions of opportunities and bilions of steps in the freecad files…
only a short update what happens at the moment. I´ll give 2k21 a try to make things better than 2k20 and so this seems to happen also for the 3D printed 3incher.
Purple Disco Machine – Love For Days
Purple Disco Machine – Exotica
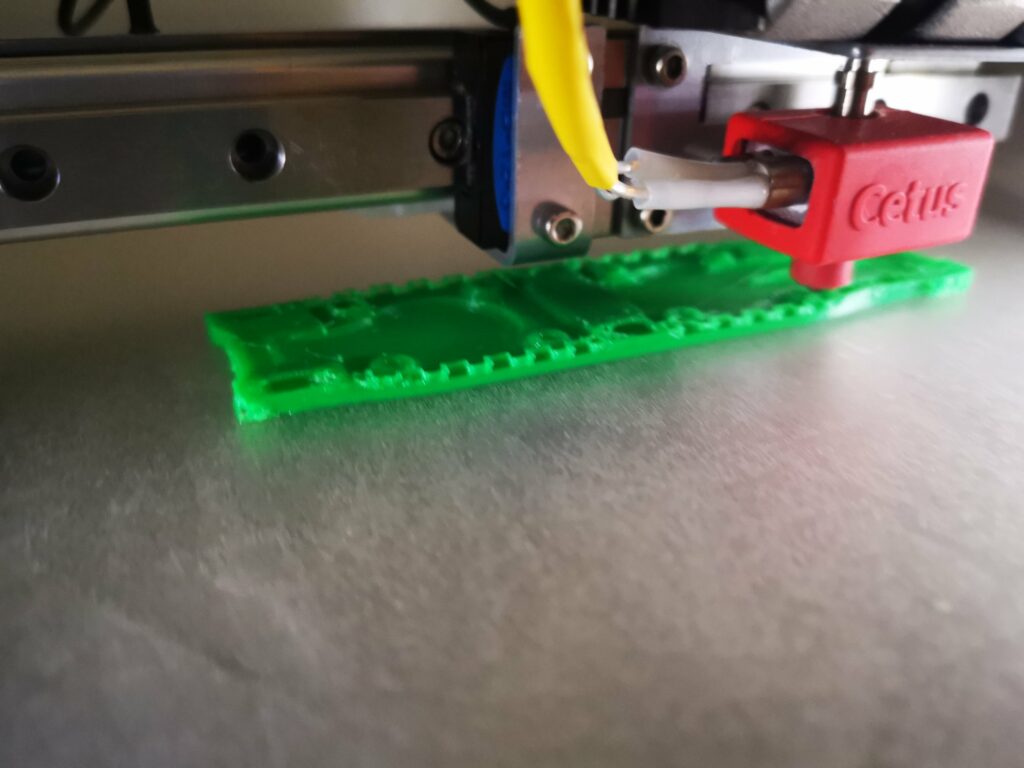
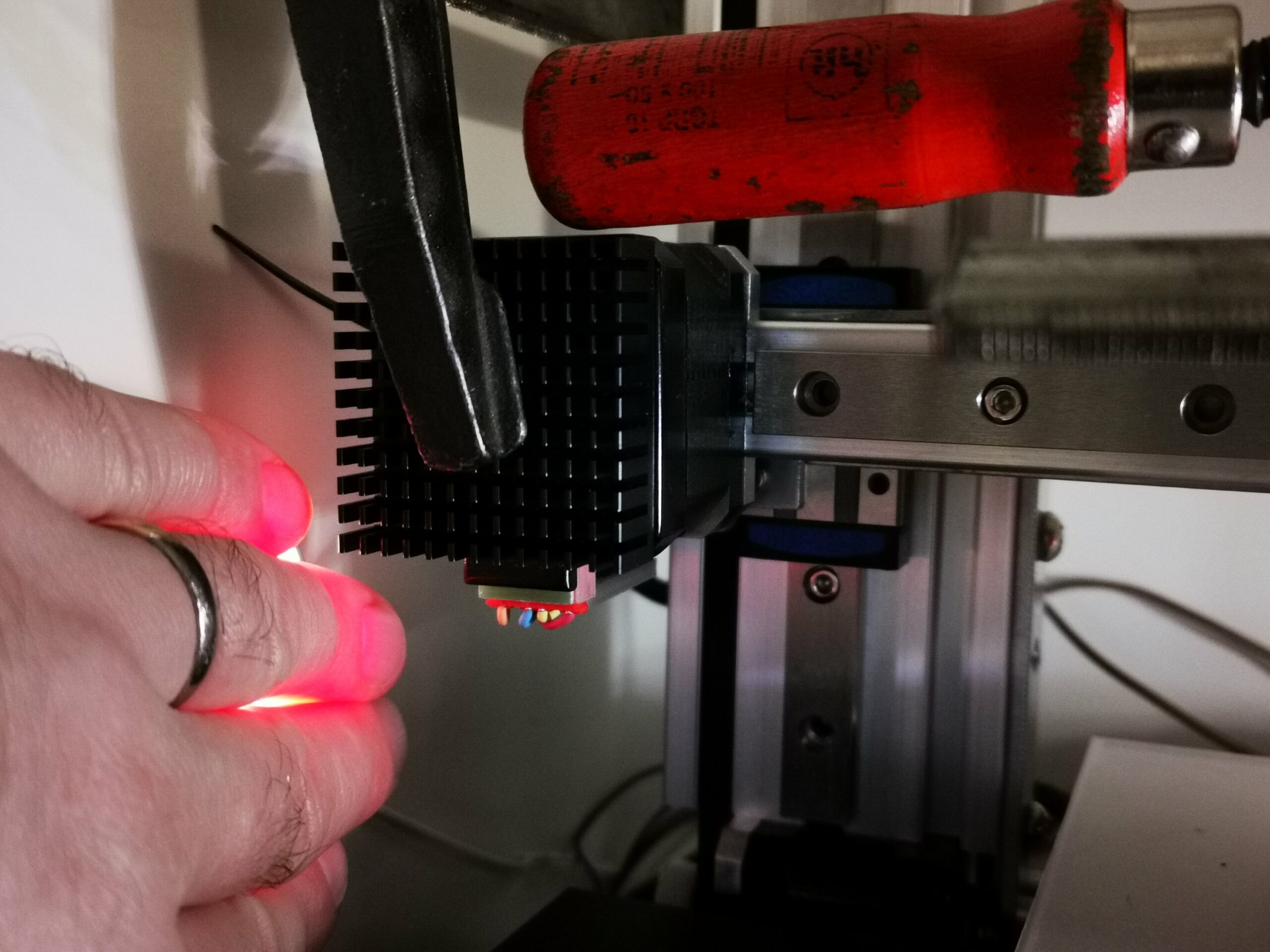
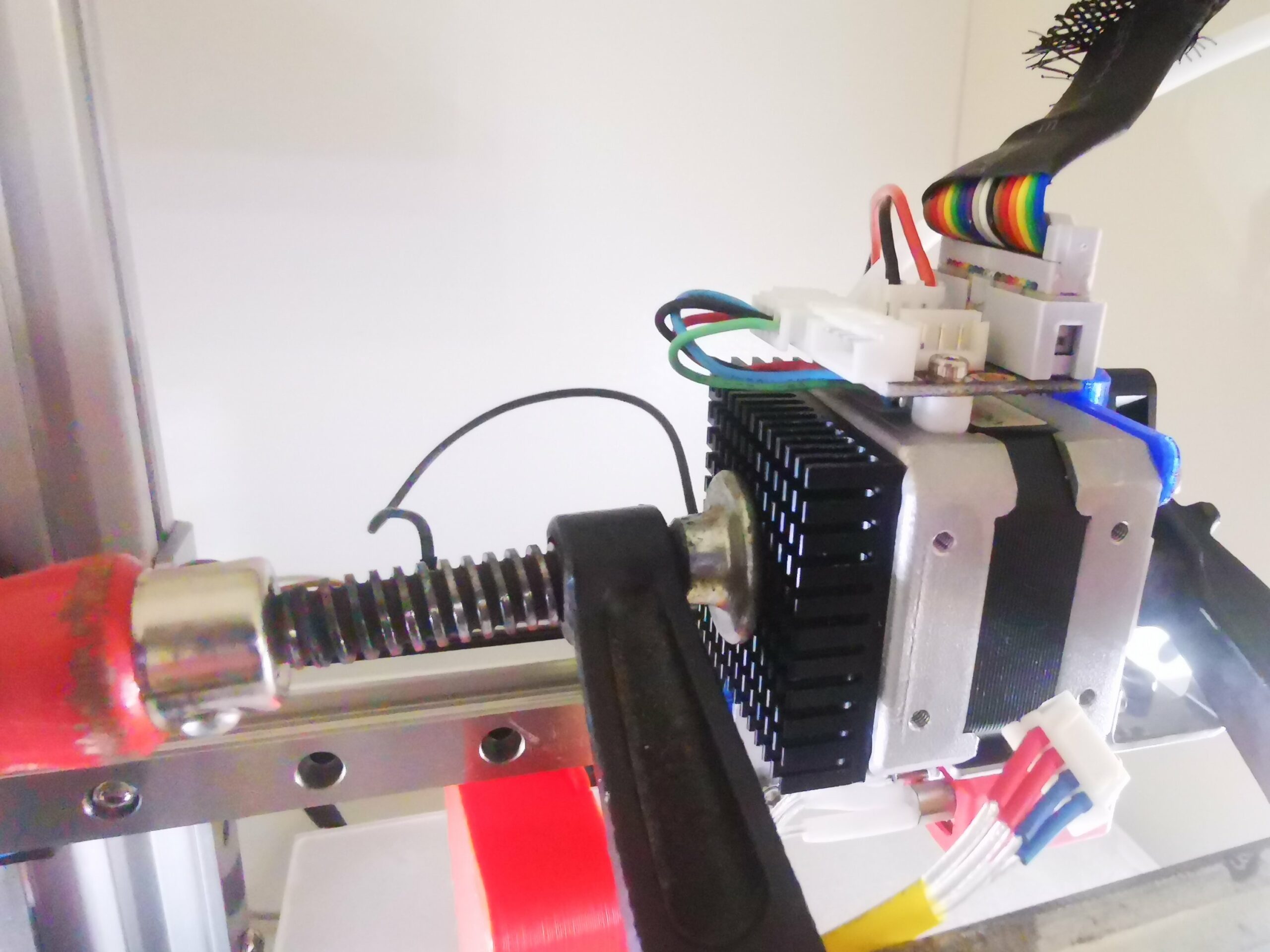
Cetus3D passive cooling
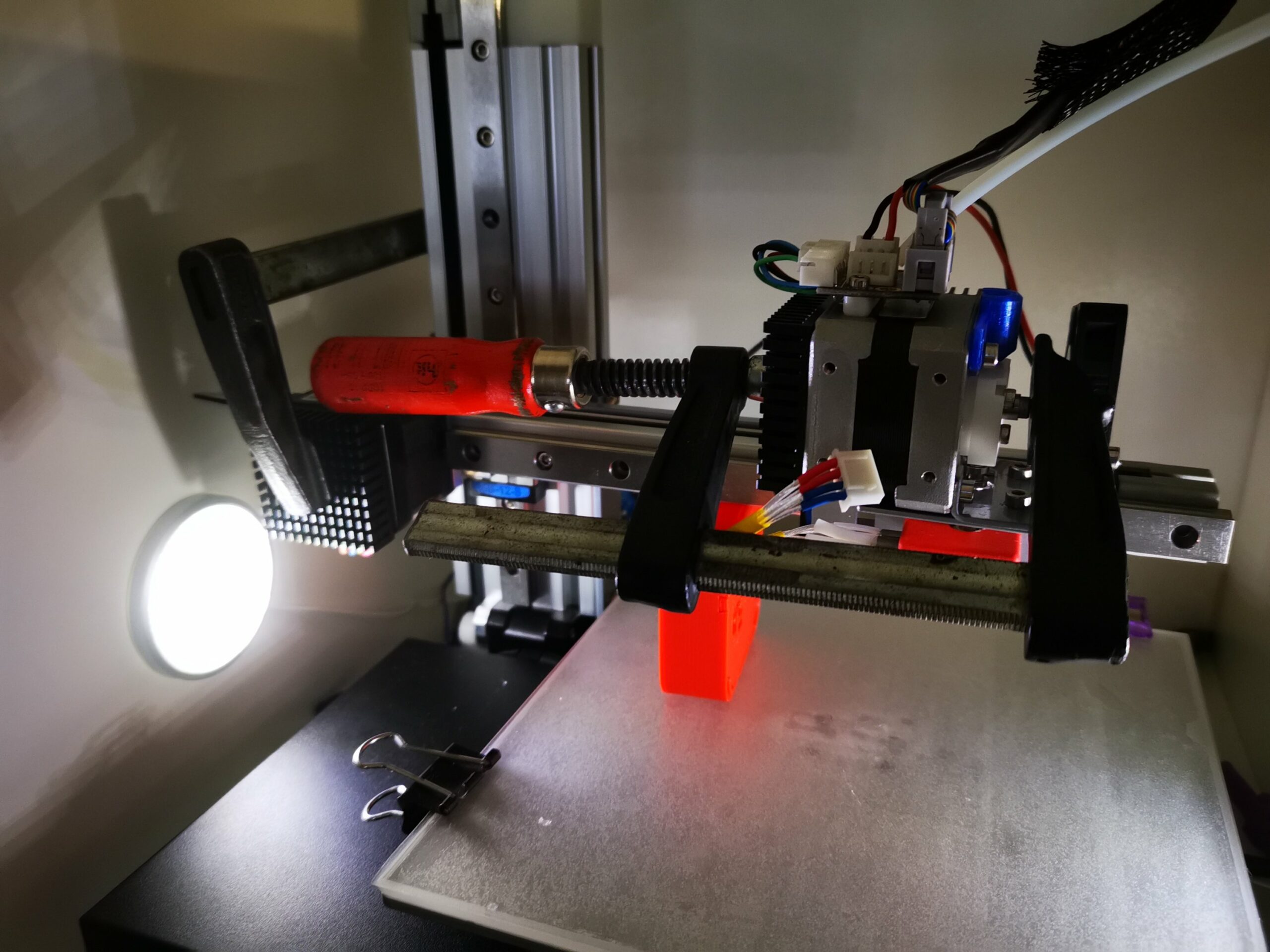
While printing again a lot of things these days and having a thermal cam in place I have to admit that the motors getting quite hot. I already changed the fan on the extruder motor but even the axis motors getting quite hot and scratching at the max operating temperature defined from the manufacturer Moons. I decided to add passive coolers to my high temp filament printer and will test the next few days how the modified cooling performs.
Tiertime Cetus 3D MK2 vs MK3 differences – Z-axis belt tensioner
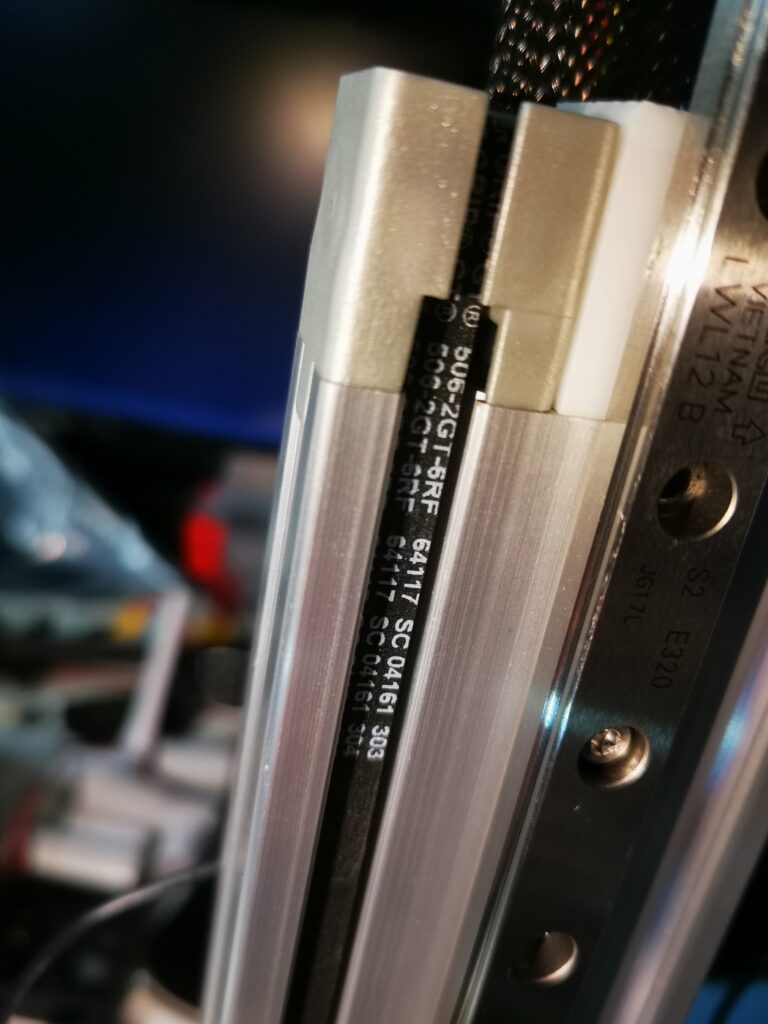
The difference of the z-axis profile length I explained in another post is only 2mm but led me to another conclusion about the belt drive. While the belt drive system on the MK3 has a self tensioning function realized in the grey plastic cap with a spring the MK2 version doesn´t have this. Due to this fact the belt on the MK2 has to be mounted already with tension to prevent backlash in the movement. Exactly this leads to the length difference of the aluminium profile. If anybody knows some preferences of the spring I would be happy to know and reorder.

Tiertime Cetus 3D MK2 vs MK3 differences – Z-axis profile
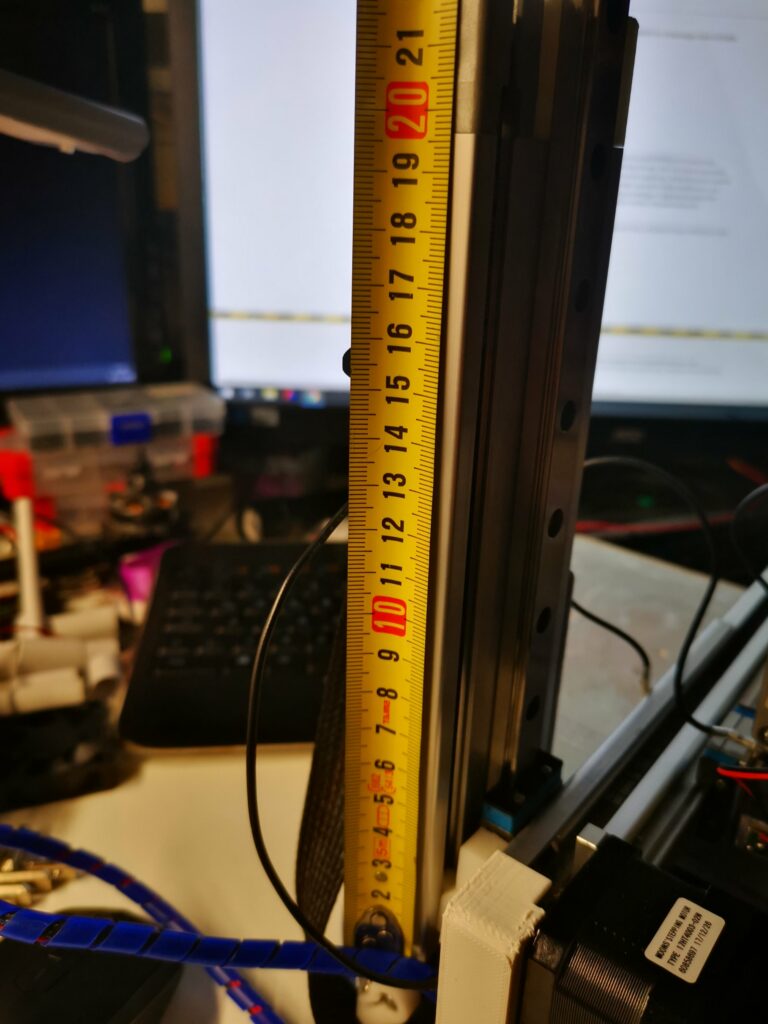
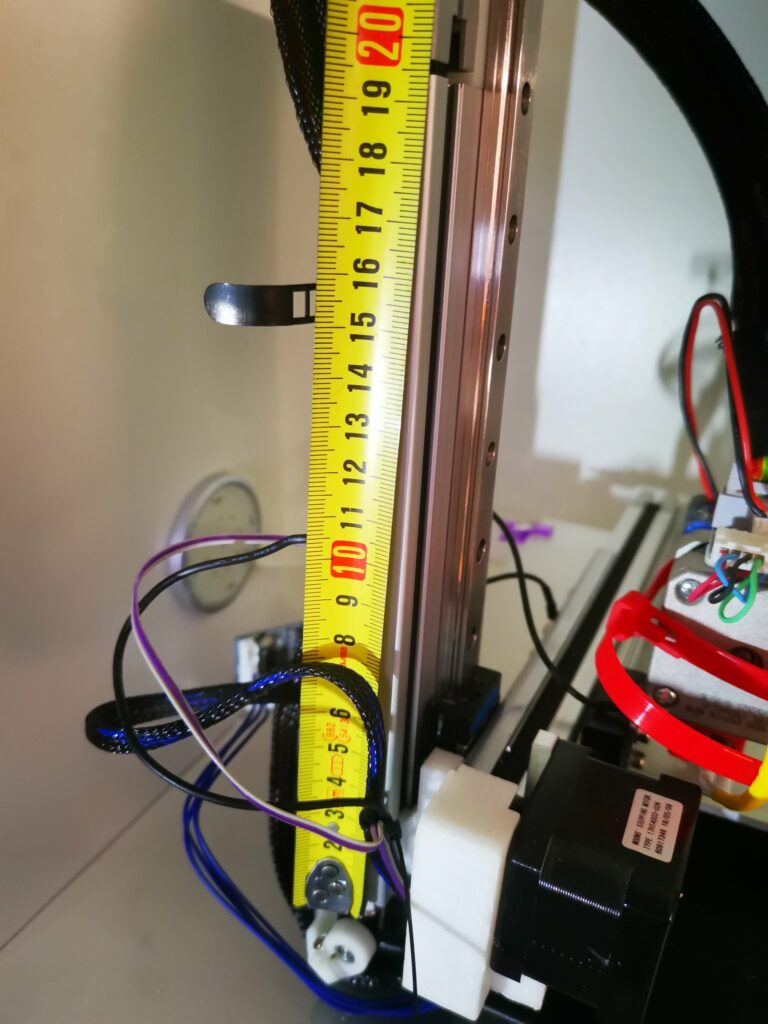
Another thing I struggled was the length of the z-axis. Tiertime provides in their forums most of the printable parts as STL files. So I printed the version for the MK3 in the hope that it will fit on the MK2. Both constructions seem the same at the first view. My z-axis top part didn´t fit properly so I tried to find out what´s wrong after a while I realized that the 60×20 aluminium profile itself compared to the MK3 differs in the length. There is a difference about 2mm which leads to a different switching point of the microswitches. So I decided to adjust this manually to get the printer ready again.
MK2 below 196mm