Due to the fact the FAA introduced a new weight limit a while ago (which is at exactly 250gr) all UAV´s heavier than 250gr had to be registered – all below are low risk UAS (https://www.dropbox.com/s/t8o4zaojpmwg3qs/Defining%20a%20Lowest-Risk%20UAS%20Category.pdf?dl=0)
Ok, they took these rules back in June 2017 but at that time also many countries worldwide jumped on their references and the 250gr limit. In a lot of these countries there is no way to prevent being forced to register or to mark your small quad with address and name. In addition to that there are a lot of rules which make it quite uncomfortable to practice our hobby.
But what if there is a solution for all your concerns? What if there is a frame which has the same stability like your oldschooled 5” or bigger? What if there is a frame which has same speeds, or even more acceleration like your beloved quadracer?
Most of you will say: “Yeah, we know there are models with less weight than 250g but you have restrictions like, flight times, bad stability and of course NO GOPRO for HD footage!”
I will answer: Yes, you´re partly right but nowadays there are solutions for your concerns without limitations.
How?… and here comes the conclusion:
Since August 2017 I’ve used my free time working on a ground braking frame design which will provide exactly what I described above and even more:
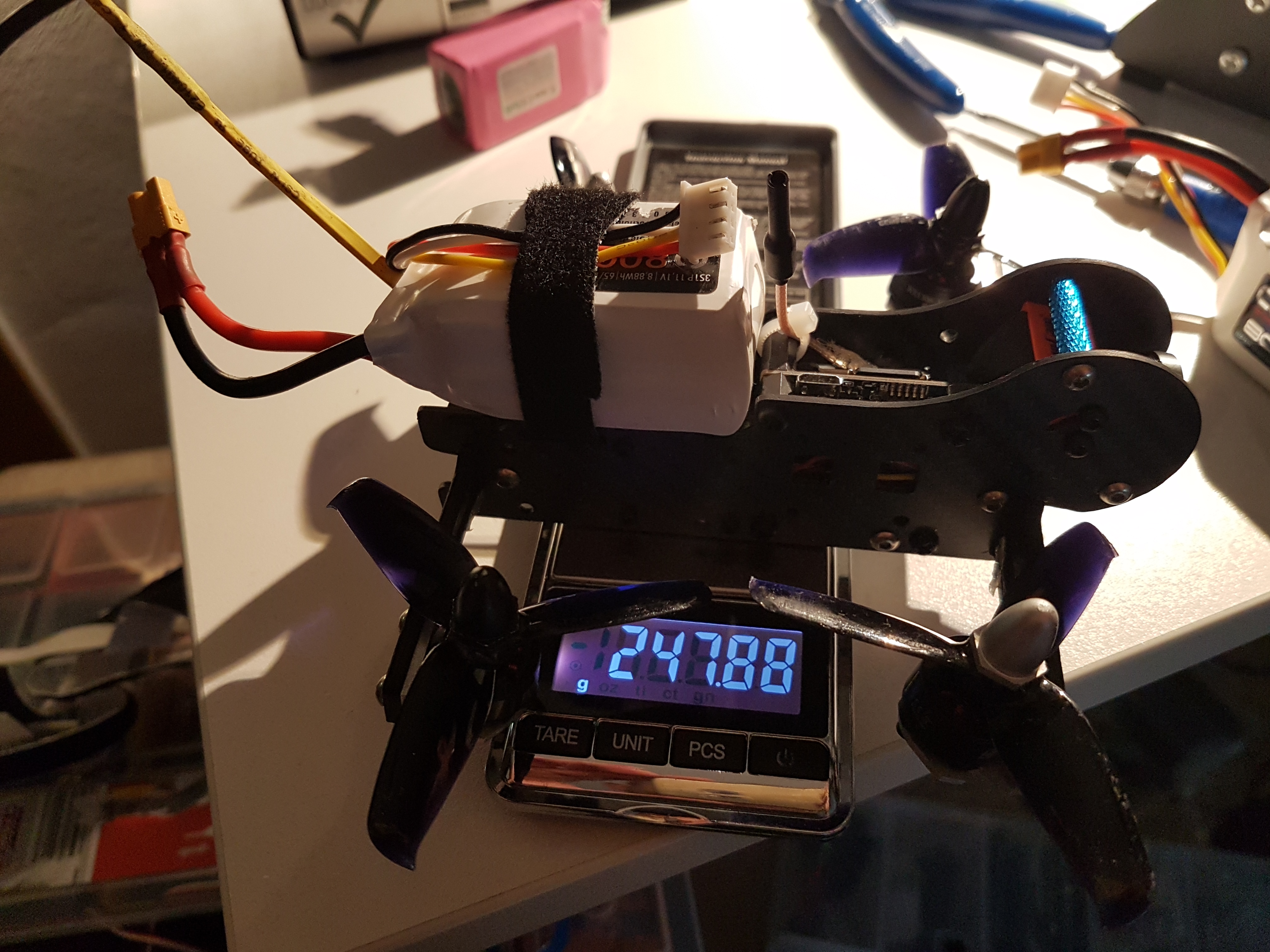
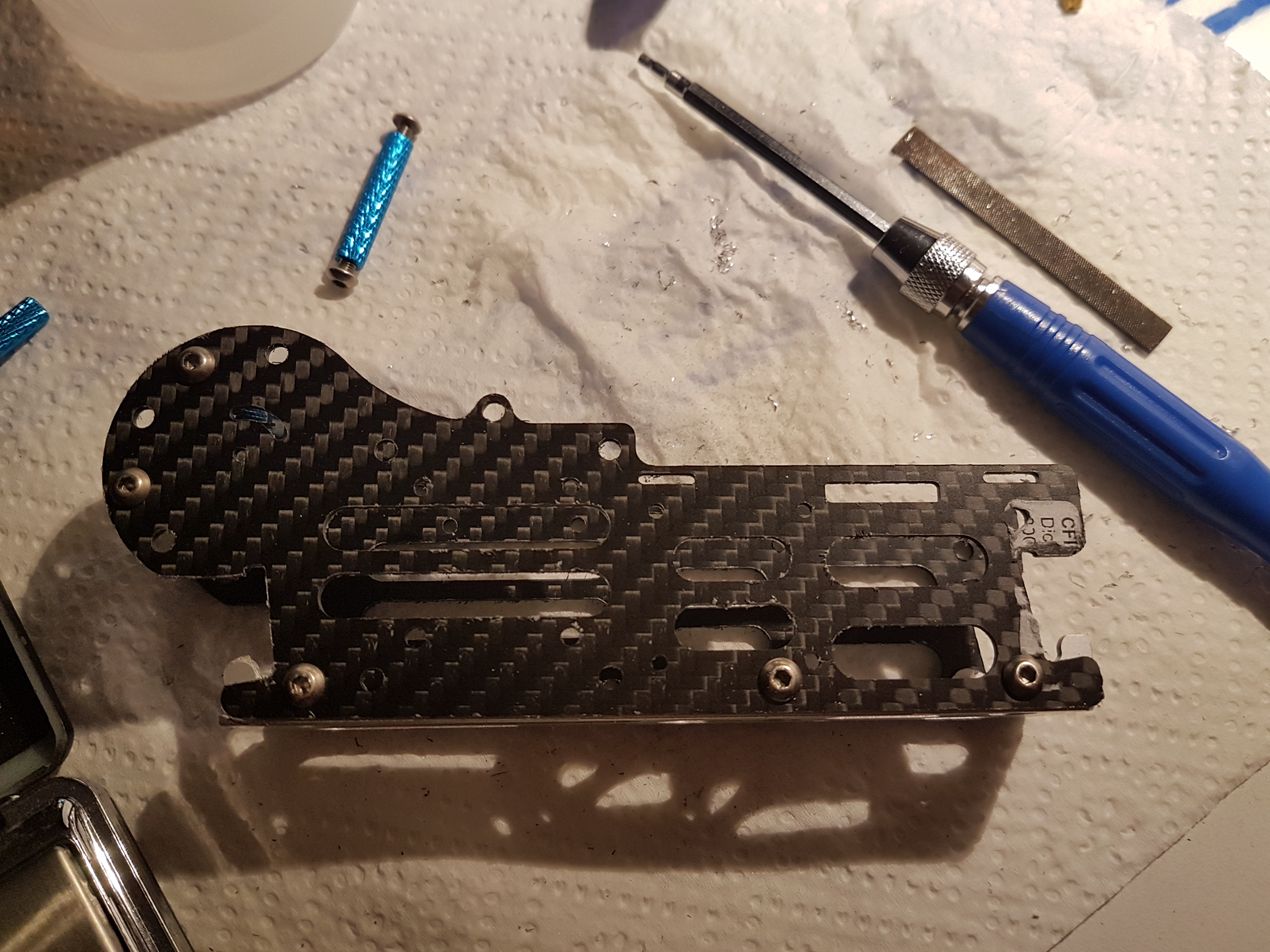
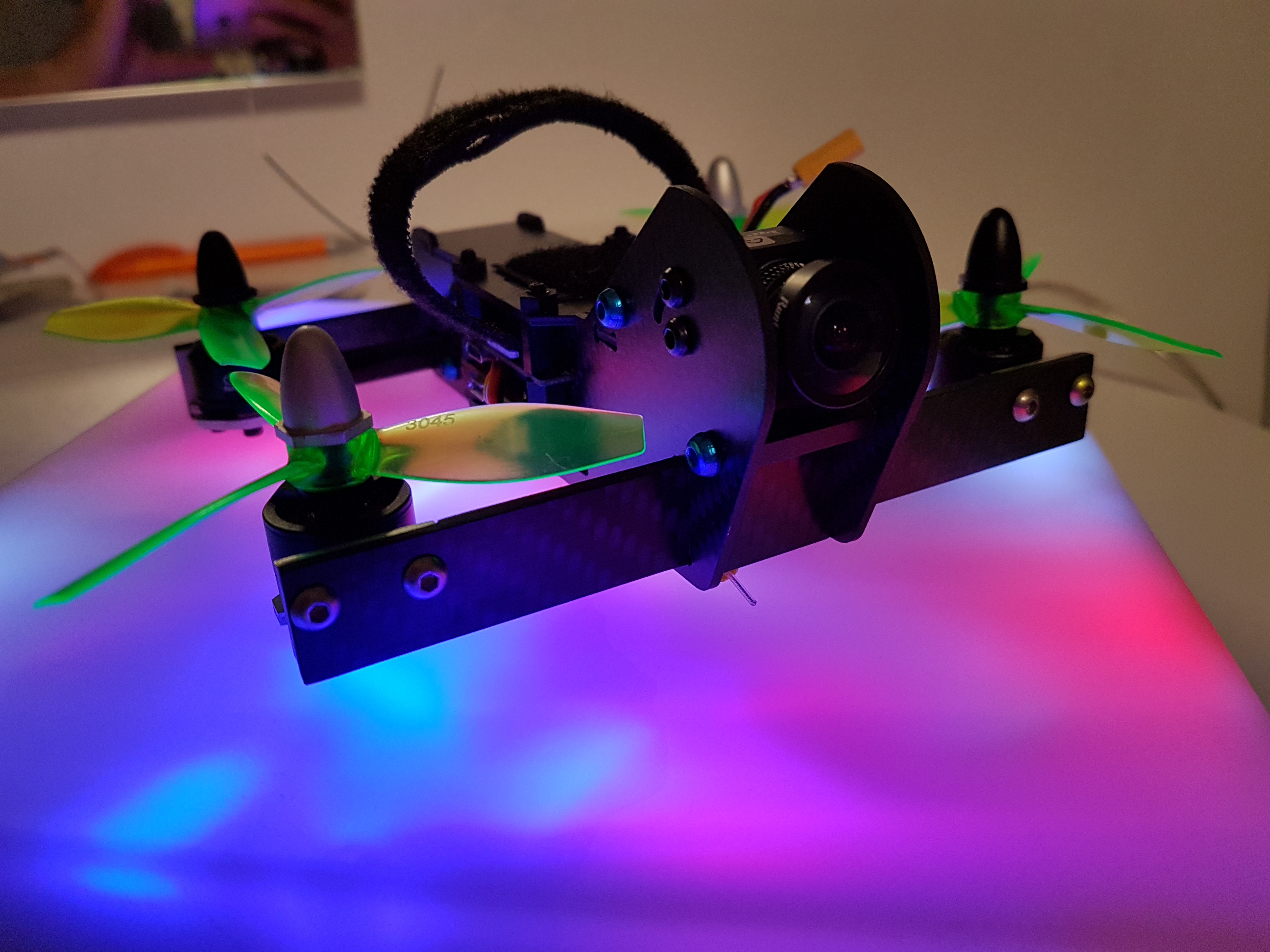
- a setup below 250gr (frame less than 50gr)
- compact size (136mm motor-motor diagonal)
- a stable design which can handle hard crashes and stress
- fully HD coverage
- efficient setup
- easily to maintain
- all components highly protected
- OSD
- battery position should be as safe as possible
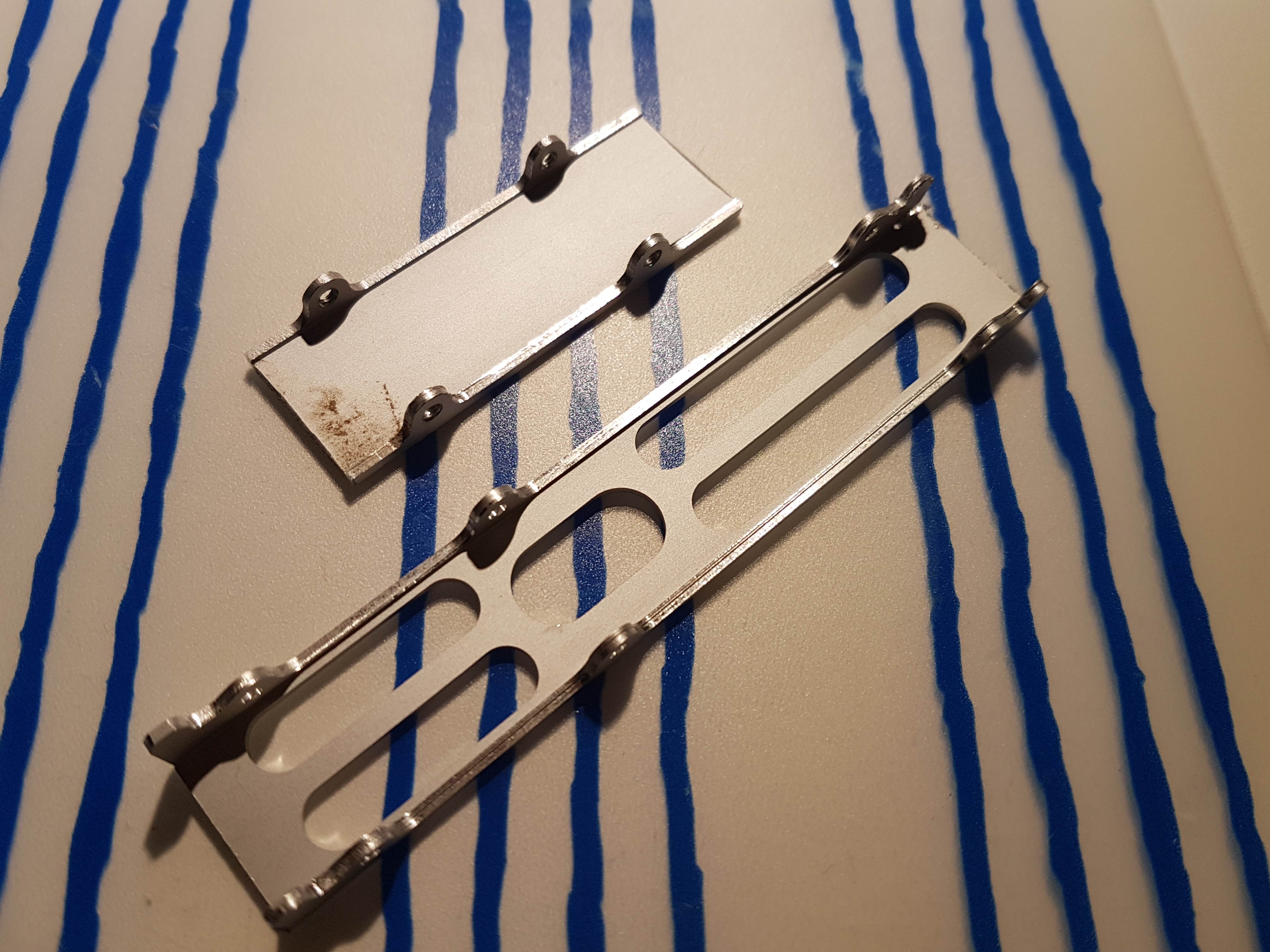
All this is only possible due to some facts: really lightweight design, state-of-the-art materials, super compact size, vertical to motor axis and tilted arms and much experience in frame designs.
First prototypes flew and gave tremendous results in flight times more than I expected. A drawback a few weeks ago wasn´t really a drawback but results in redesigning the frame from the scratch and deleting all weak points but with all benefits the frame already had. Today I´m able to introduce the “mosquito”